



An API conversion tool for reinforcement learning environments.
Shimmy provides Gymnasium and PettingZoo bindings for popular external RL environments.
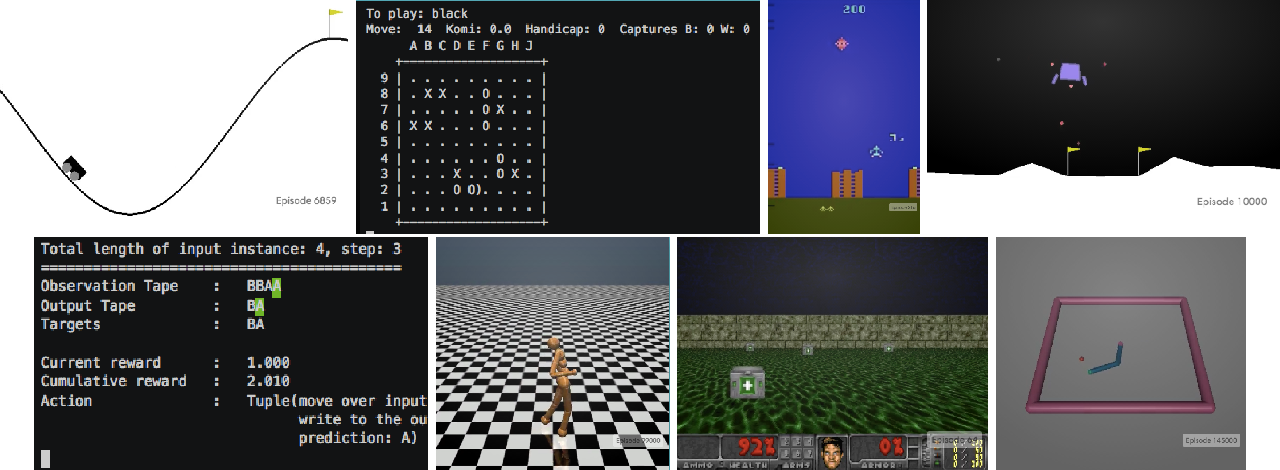
DM Control: 3D physics-based robotics simulation.¶ |
DM Control Soccer: Multi-agent cooperative soccer game.¶ |
DM Lab: 3D navigation and puzzle-solving.¶ |
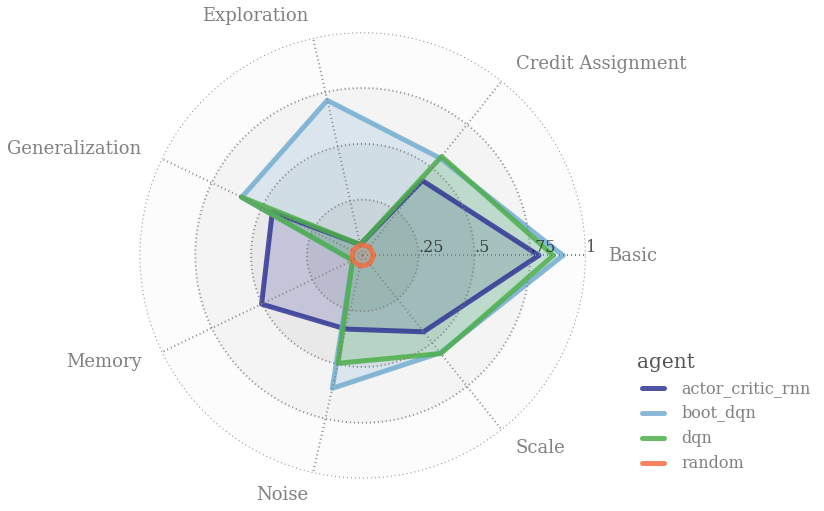
Behavior Suite: Test suite for evaluating model behavior.¶ |
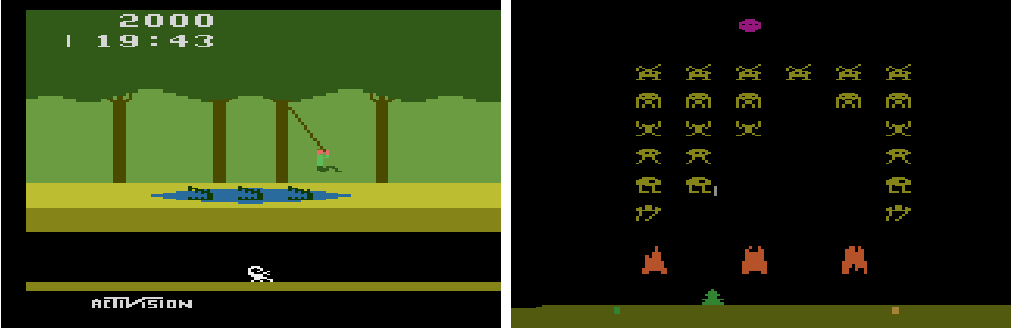
Atari Learning Environment: Set of 50+ classic Atari 2600 games.¶ |
Melting Pot: Multi-agent social reasoning games.¶ |
OpenAI Gym: Compatibility support for Gym V21-V26.¶ |

OpenSpiel: Collection of 70+ board & card game environments.¶ |
Environments can be interacted with using a simple, high-level API:
import gymnasium as gym
env = gym.make("dm_control/acrobot-swingup_sparse-v0", render_mode="human")
observation, info = env.reset(seed=42)
for _ in range(1000):
action = env.action_space.sample() # this is where you would insert your policy
observation, reward, terminated, truncated, info = env.step(action)
if terminated or truncated:
observation, info = env.reset()
env.close()